Unir les forces pour lutter contre les rumex – telle est la devise défendue par Agroscope et ses partenaires néerlandais, danois, français et suisses pour trouver des solutions contre ce fléau. Le but du projet européen Era-Net-ICT-Agri «DockWeeder» est de développer un robot autonome qui détruit le rumex à l’eau bouillante.
La lutte contre les rumex dans l’agriculture biologique est une activité manuelle qui demande beaucoup de temps et de main-d’œuvre. La pression exercée par les rumex est telle qu’elle peut conduire les agricultrices et les agriculteurs à quitter la production biologique. En développant un traitement à l’eau bouillante, Agroscope a ouvert une alternative pour lutter contre les rumex dans les herbages sans utiliser de produits chimiques. Cette solution a fait son entrée dans la pratique notamment sous la forme de l’appareil de lutte contre les rumex à l’eau bouillante de la société Hans Bachmann Hochdruck-Anlagen AG. La prochaine étape du développement consiste à automatiser la lutte. L’idée est de concevoir un véhicule porteur sans conducteur qui circulerait de manière autonome sur les parcelles, identifierait automatiquement les plantes et les traiterait à l’eau bouillante. Dans le projet DockWeeder, les partenaires néerlandais, danois et suisses s’occupent de l’identification des plantes par l’image. Deux partenaires français se chargent de la partie concernant le véhicule autonome et le transfert des connaissances à la pratique. Enfin, le traitement des plantes à l’eau bouillante est géré par Agroscope et la société Bachmann AG de Bütschwil.
Identifier la plante indésirable sans erreur
L’Institut IMS de la Haute école zurichoise des sciences appliquées ZHAW a conçu un système d’imagerie composé de trois caméras monochromes et d’un scanner laser LiDAR. Le système permet la saisie synchronisée des données avec des marqueurs temporels précis et une localisation au centimètre près pour chaque type de données. Les données ont été collectées à l’aide du robot «MAVERiC» de l’IMS ZHAW sur différents sites en Suisse, en France et aux Pays-Bas. Ces relevés ont servi de bases aux partenaires du projet pour le traitement des images.
L’Université et le centre de recherche de Wageningen (WUR) ont coordonné l’ensemble du projet. Ils ont ensuite cherché à combiner l’information provenant de deux sources ou plus, afin d’obtenir une identification plus solide. Les images des caméras peuvent par exemple être recoupées avec les scans tridimensionnels du laser. Les écarts dans les résultats des différents procédés sont combinés à l’aide de procédures d’estimation compte tenu de l’incertitude de la méthode de mesure.
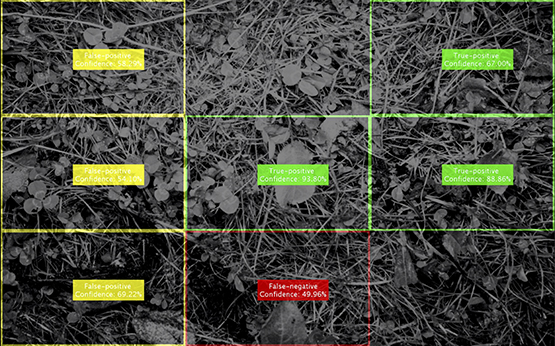
L’Université d’Aalborg au Danemark (AAU) est chargée de faire la synthèse des demandes des utilisateurs du projet et s’occupe aussi d’une partie de l’identification des adventices. Des systèmes de calcul capables d’auto-apprentissage ont été utilisés pour l’identification des rumex en images 2D. Pour développer les algorithmes, un grand nombre d’images de rumex caractérisés ont été lues. L'algorithme de détection permet de renvoyer les résultats pour chaque segment d'image. C’est ainsi que l’appareil reconnait les rumex.
Construire un robot fonctionnel
Terrena, la plus grande coopérative agricole française, a apporté au projet un catalogue des exigences techniques et économiques de ses membres. Elle a organisé la campagne de saisie d’images en collaboration avec la ZHAW. Terrena a supervisé la page de projet www.dockweeder.eu. Enfin, les Français ont sensibilisé l’opinion publique et ont représenté le consortium lors du Space2017 à Rennes. De plus, Terrena fait le lien avec Shark Robotics, qui soutient le consortium avec la conception d’un véhicule porteur autonome.
Agroscope, en tant que concepteur, et la société suisse Hans Bachmann Hochdruck-Anlagen AG, en tant que fabricant d’appareils de lutte contre les rumex à l'eau bouillante à commande manuelle, sont chargés de réaliser le système d’application de l'eau bouillante. L’application automatisée de l’eau à la racine des plantes a nécessité la construction d’une nouvelle buse rotative et l’adaptation de l’appareil à ce nouvel élément. Des unités linéaires coulissantes transversalement permettent de positionner la nouvelle tête d’application au-dessus de la plante à traiter.
La collaboration transfrontalière s’est avérée très fructueuse. Les progrès réalisés dans les divers domaines permettent d’espérer qu’un robot adapté à la pratique sera bientôt une réalité.