“Combining strengths to control broad-leaved dock” is the slogan under which Agroscope works with Dutch, Danish, French and Swiss partners to develop solutions for combatting these undesirable plants. The aim of the European Era-Net/ICT-Agri Project ‘DockWeeder’ is to develop an autonomous dock-destroying robot that targets Rumex obtusifolius plants with hot water.
Controlling broad-leaved dock in organic farming is a time-consuming, manual-labour-intensive process. Weed pressure from docks can lead to farmers abandoning organic production. In developing the hot-water treatment, Agroscope has created an alternative for chemical-free dock control in grassland which has found its way into practice inter alia in the form of (high-pressure equipment manufacturer) Hans Bachmann Hochdruck-Anlagen AG’s hot-water dock-control device. As the next developmental step, automation of control now comes into play. The aim is to accomplish this with an unmanned carrier vehicle that will navigate autonomously on the fields, detect the plants automatically, then treat them with hot water. In the ‘DockWeeder’ project, Dutch, Danish and Swiss project partners are working on image recognition of the plants. Two French partners are responsible for the autonomous vehicle and knowledge-transfer-to-practice elements. The hot-water-treatment component is handled jointly by Agroscope and Bachmann AG (Bütschwil, canton of St. Gallen).
Fault-free detection of the undesirable plant
The Institute of Mechatronic Systems (IMS) of the Zurich University of Applied Sciences (ZHAW) designed an imaging system with three monochrome cameras and a LiDAR (laser) scanner. The system enables synchronised data acquisition with precise time stamps and centimetre-accurate positioning for each data type. The ZHAW-IMS ‘MAVERiC’ robot was used to collect data on sites in Switzerland, France and the Netherlands. The project partners used this collected data as the basis for the image processing.
Wageningen University & Research (WUR) coordinated the entire project. Furthermore, WUR combined information from two or more sources in order to achieve a more robust detection – e.g. images from cameras could be overlaid with the three-dimensional laser scans. Deviations in the recognition results of the different methods were then combined using estimation techniques, taking into account the uncertainty of the measurement method.
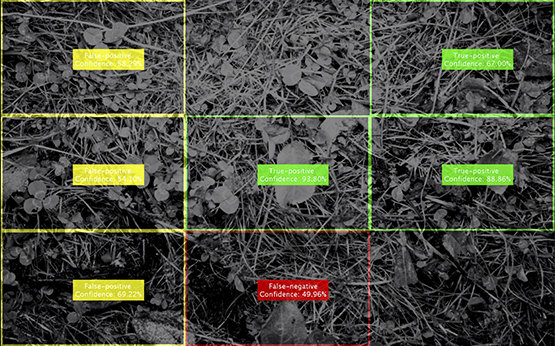
Aalborg University, Denmark (AAU) is responsible for compiling the project’s user requirements as well as for part of the weed detection. Self-learning calculation methods were used for dock detection in 2D images. A large number of images with labelled docks were imported to train the algorithms. The detection algorithm then provided results for the individual image segments. This is how the device detects the dock plants.
Building a fully functional robot
France’s largest agricultural cooperative, Terrena, contributed a technical and economic user requirements catalogue of their members to the project. Together with the ZHAW, it organised the imaging campaign. Terrena maintained the project website www.dockweeder.eu. The French also carried out PR activities and represented the consortium at the Space2017 livestock exhibition in Rennes. Moreover, Terrena was the link to Shark Robotics, who supported the consortium by designing an autonomous carrier vehicle.
Agroscope and the Swiss company Hans Bachmann Hochdruck-Anlagen AG were jointly entrusted with the design of the hot-water application – the former as process developers, the latter as manufacturers of hand-guided hot-water dock-control devices. Automated water application to the roots necessitated the redesign of a rotating nozzle unit and the adaptation of the device to the new nozzle. Crossways-sliding linear units enabled the positioning of the new application head above the plant to be treated.
The cross-border cooperation here proved very fruitful. The progress achieved in the various areas lead us to hope that a robot suitable for use in practice will soon be a reality.